We will calculate how to ascertain the quantity of the brickwork required. Here Calculation of Brick Work Quantity nitty gritty clarification given underneath. Subsequent to realizing the 1 meter cube volume we can figure the staying quality effectively by simply increasing the 1 meter cube aftereffect of the ideal volume.
1. The width of the wall which is going to be fabricated.
2. Number of the opening in the wall like (Door,Windows,etc)
3. Size or which sort of the brick going to utilize
We should take a guide to see well.
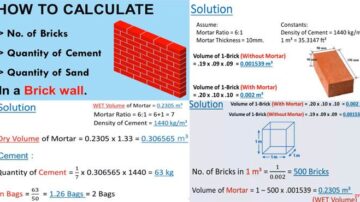
Model: Assume we need to build the wall having a volume of 1 meter cube,the size a brick is going to utilize is 190 mm x 90 mm and mortar is 8 mm thick with a proportion of 1:4. So, we need to find out the following:
1. Quantity of bricks
2. Quantity of cement
3. Quantity of sand
Given information : This calculation can happen into 2 stages.
1. Brick Calculation
2. Mortar Calculation
Step1: Volume of 1 brick
= 0.19 m x 0.09 m x 0.09 m
= 0.001539 meter cube
Volume of 1 brick with mortar
= 0.198 m x 0.098 m x 0.098 m
= 0.0019 meter cube
Dry Volume
= 0.19 x 1.33
= 0.2527 meter cube(dry volume)
Note: 1.33 is a constant
Cement:
= (dry volume x Ratio x Density of cement in 1 cum)/Sum of Ratio
= (0.2527 x 1 x 1440)/5
= 72.77 kg/50 <1 sack = 50 kg>
= 1.5 sacks
Sand:
= (dry volume x proportion x 35.3147) / Sum of ratio(1 cum = 35.3147 cubic feet)
= (0.2527 x 4 x 35.3147)/5
= 7.1 cubic feet
Results
Bricks = 526
Cement = 1.5 packs
Sand = 7.1 cubic feet
Note: These proportions may change by changing the component of the mortar thickness or size of the bricks just as the mortar proportions 1:4, 1:6 and so on.
Leave a Reply
You must be logged in to post a comment.